R. Kiko
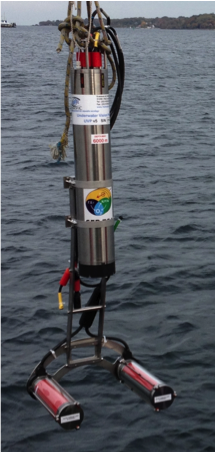
Der UVP, angebaut an die CTD-Rosette. R. Kiko
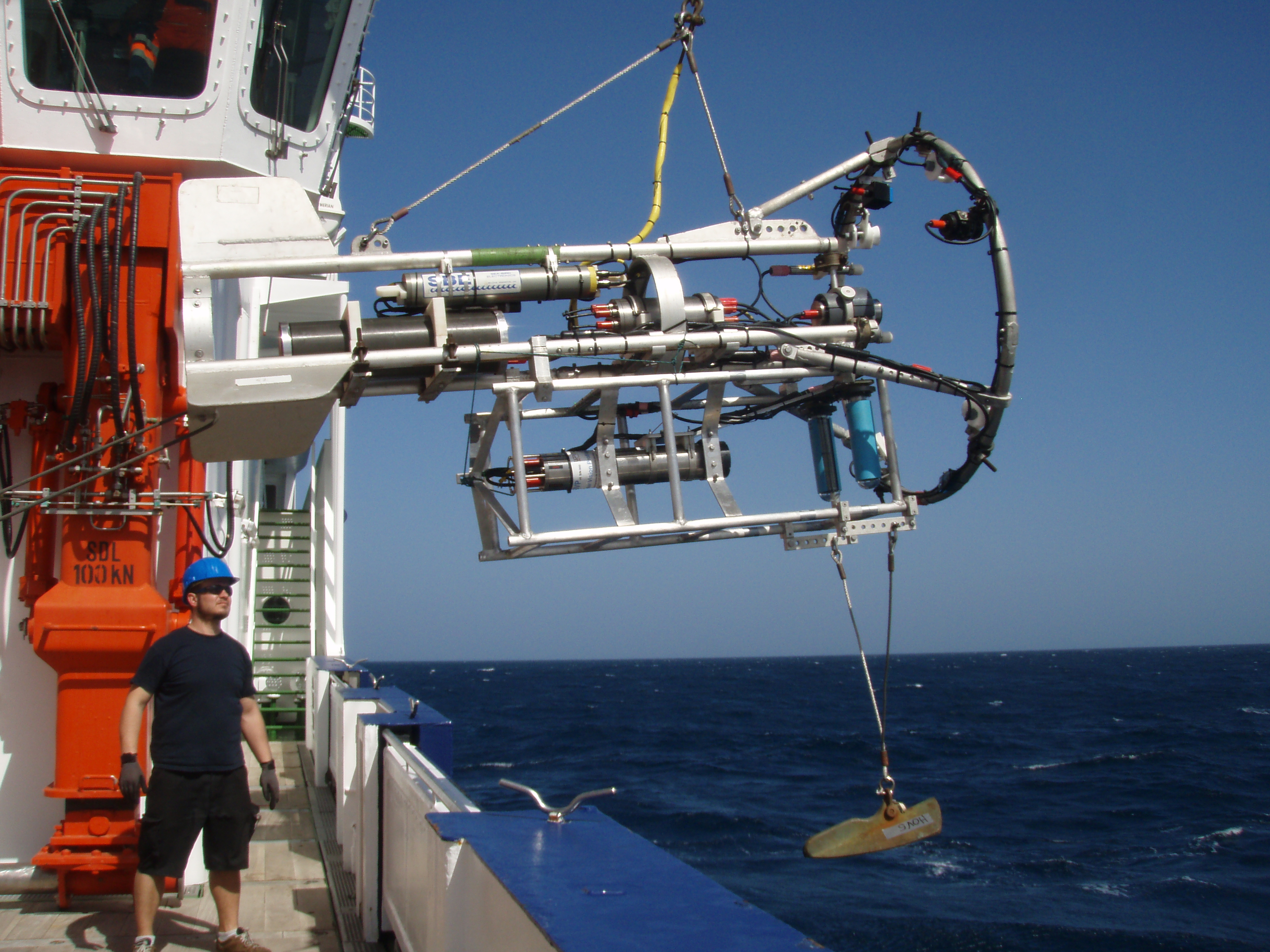
Der UVP an PELAGIOS. S. Christiansen
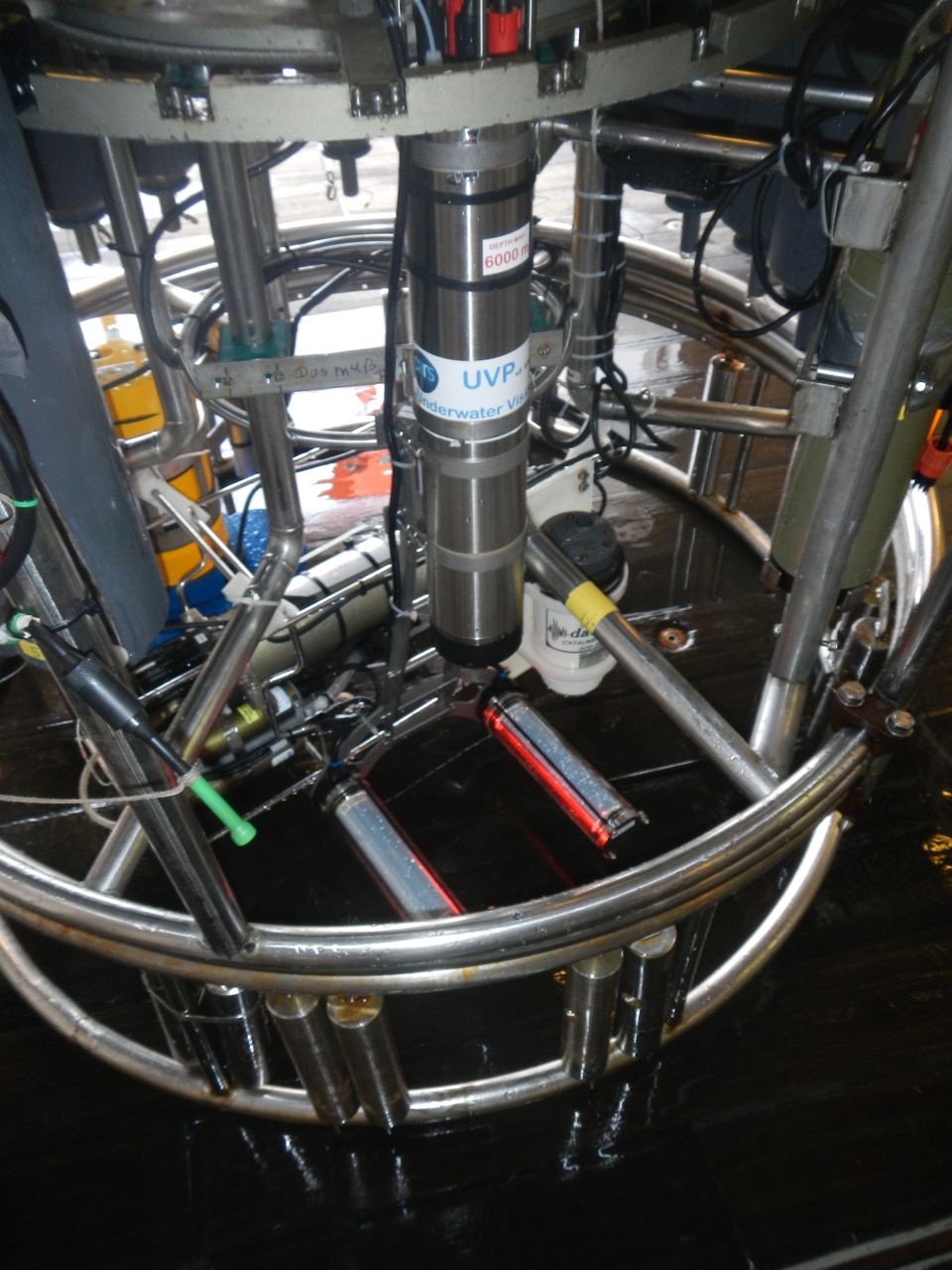
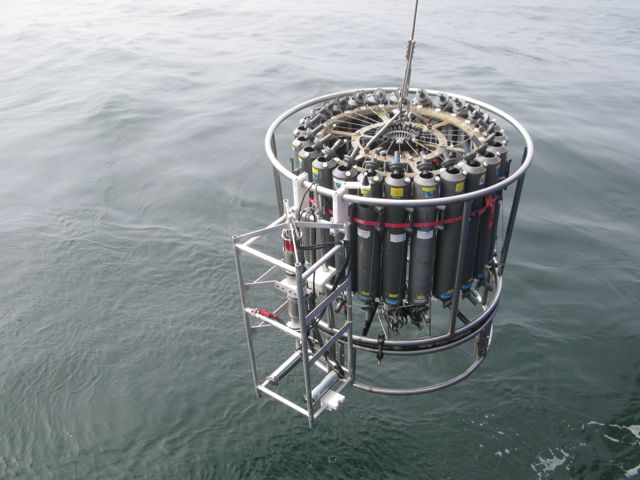
Der UVP, eingebaut in der CTD-Rosette. R. Kiko
Der Underwater Vision Profiler (UVP) ist eine druckfeste Unterwasserkamera, welche bis in 6000 m Tiefe Fotos von Plankton und Partikeln macht. Der UVP besteht aus einer hochauflösenden Kamera in einem druckfesten Gehäuse und zwei LED-Blitzen, welche an die Kamera gekoppelt sind und zwischen 6 und 11 mal pro Sekunde ein Volumen von ungefähr einem Liter Wasser ausleuchten. Es entstehen also 6 bis 11 Bilder pro Sekunde. Dies bedeutet, dass bei einem Einsatz von der Oberfläche bis in 600 m Tiefe etwa 6 Kubikmeter Wasser aufgenommen werden.
Der UVP wird meistens in die CTD-Rosette - das ist eine Sonde zum Messen von Temperatur, Salzgehalt, Tiefe (Englisch Conductivity, Temperature, Depth) und auch zum Beispiel Sauerstoff - eingebaut und mit der CTD an einem Draht von der Meeresoberfläche bis in die gewünschte Tiefe hinabgelassen. Der UVP kann jedoch auch autonom gefahren werden, oder etwa an einer geschleppten Videokamera befestigt (siehe unten).
Manchmal wird der UVP nicht mit der CTD-Rosette vertikal gefahren, sondern zusammen mit einem anderen Kamerasystem, dem ’pelagic in situ observation system’ PELAGIOS. PELAGIOS ist eine Unterwasservideokamera, welche an einem Draht in festgelegten Tiefen bei einem Knoten Fahrt hinter dem Forschungsschiff hinterher geschleppt wird. An diese Kamera haben wir während inzwischen drei Fahrten den UVP angebaut und schleppen lassen. Bei solchen geschleppten oder ’Transektprofilen’ kommen noch einmal deutlich mehr Bilder zustande als bei den ’normalen’ vertikalen Profilen, weshalb wir bisher kaum mit diesen Daten arbeiten konnten. Dank eurer Hilfe können wir aber nun auch diese Datenmengen angehen!
Die Bilder, die der UVP während eines Einsatzes aufnimmt werden direkt in der Kamera prozessiert, das heißt aus jedem Bild, welches ungefähr eine DIN A4 Größe Fläche fotografiert, werden alle Objekte größer als 400 µm in Einzelbilder, sogenannte Vignetten umgewandelt. Kleinere Objekte werden vermessen und die Daten gespeichert. Zudem misst der UVP die Tiefe, in der er sich befindet, und hat eine eingebaute Uhr.
Sobald der UVP wieder an Bord ist, werden die Vignetten und die Datenblätter auf einen Computer geladen. Die Vignetten werden dann weiter prozessiert, vermessen und schließlich über einen Algorithmus vorsortiert.
Diese Vorsortierung muss anschließend noch überprüft werden und genau das macht ihr in unserem Spiel!
Was ist unser aktuelles Projekt?
