R. Kiko
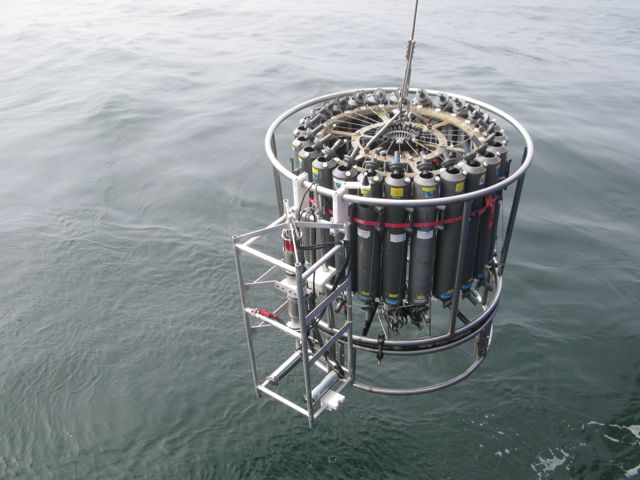
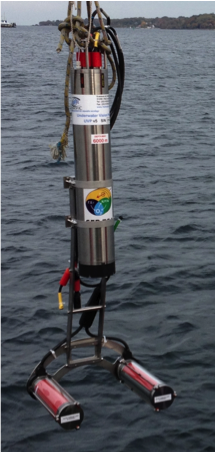
L'UVP, attaché à la rosace CTD. R. Kiko
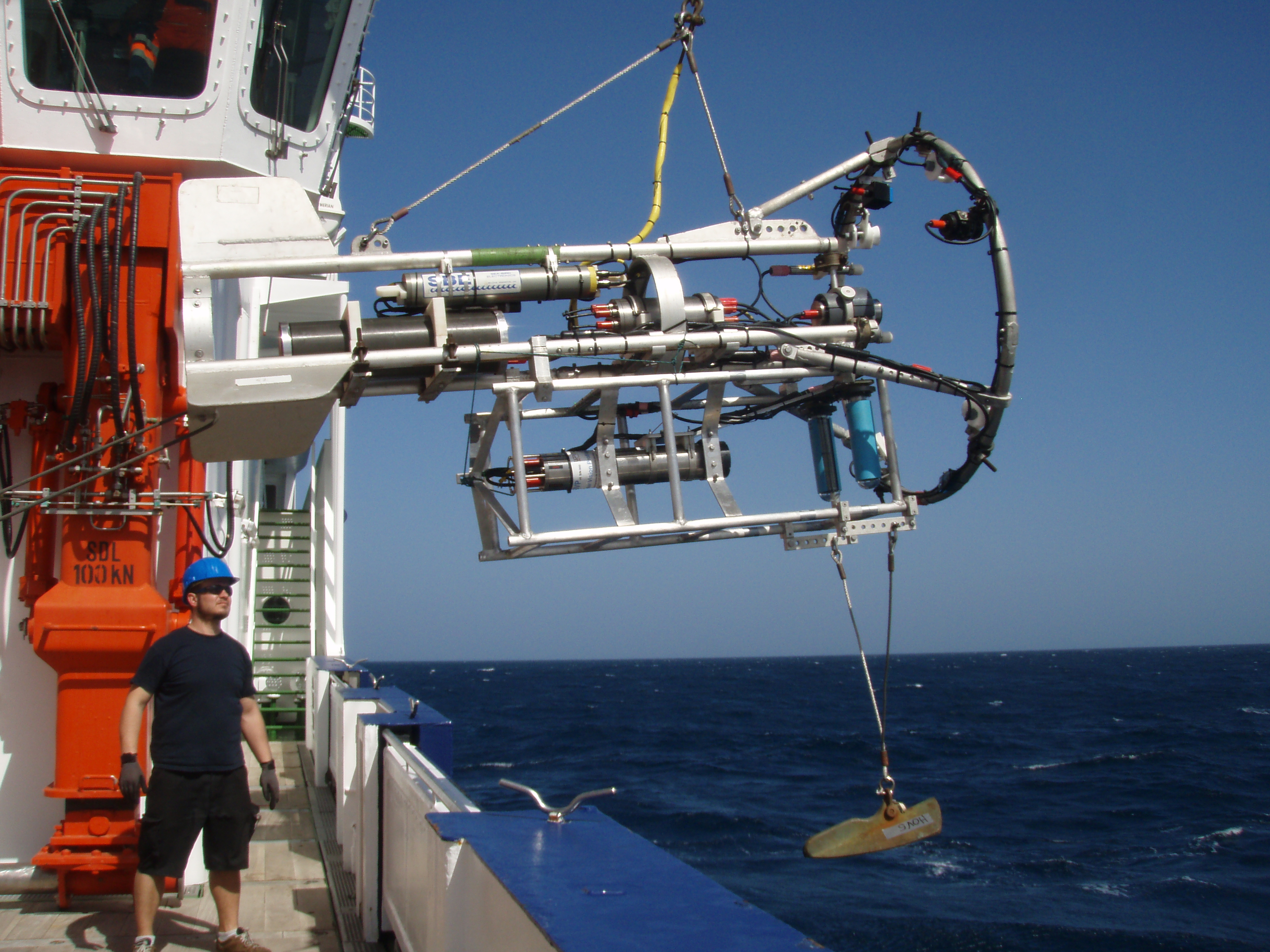
L'UVP à PELAGIOS. S. Christiansen
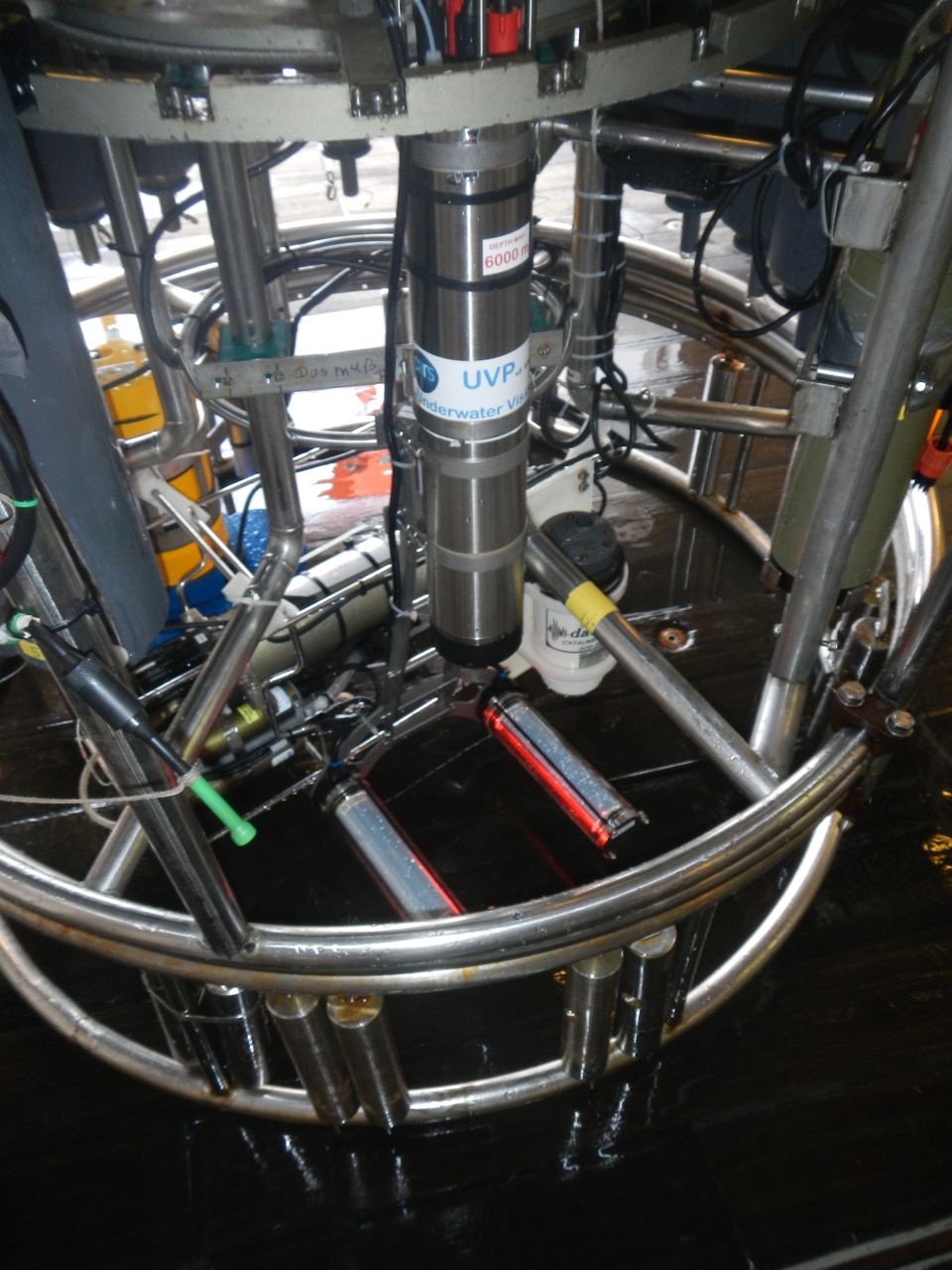
L'UVP, intégré à la rosace CTD. R. Kiko
Le Underwater Vision Profiler (UVP) est une caméra sous marine résistante à la pression qui peut prendre des images de Plancton et des particules jusqu'à 6000 m de profondeur. L'UVP se compose d'un boîtier résistant à la pression et de deux flashs LED qui sont couplés à la caméra. Ces lumières clignotent entre 6 et 11 fois par seconde et éclairent un volume d'environ 1 litre entre les lumières. Par conséquent, 6 à 11 images par seconde sont prises pendant le déploiement de l'UVP. Cela signifie que pendant un déploiement de la surface à 600m de profondeur, environ 6 mètres cubes d'eau sont imagés.
L'UVP se trouve normalement intégré dans la rosace CTD - c'est une sonde qui mesurela Conductivité, la Température et la Depth (profondeur) mais aussi d'autres paramètres comme l'oxygène. La rosace CTD avec l'UVP intégré sont abaissés sur un fil de la surface jusqu'à la profondeur désirée et l'UVP prend des images de plancton et de particules pendant la descente. Nous déployons également l'UVP de manière autonome et dans un 'sandwich' avec une caméra vidéo (voir ci-dessous).
Parfois, l'UVP n'est pas déployé verticalement avec la rosace CTD, mais avec un autre système de caméra, le "système d'observation pélagique in situ" PELAGIOS. PELAGIOS est une caméra vidéo sous-marine qui est remorquée derrière le navire de recherche à une vitesse de 1 nœud à des profondeurs distinctes et qui enregistre en particulier le zooplancton gélatineux. Lors de trois croisières, nous avons attaché l'UVP à cette caméra et l'avons remorquée à des profondeurs allant jusqu'à 1000 m. Au cours de ces «profils de transect», beaucoup plus d’images sont enregistrées que lors de profils «normaux». Par conséquent, nous étions jusqu'à présent à peine capables de travailler avec ces larges données. Avec votre aide, nous pouvons désormais également explorer ce vaste ensemble de données!
Chaque image prise par l'UVP a une taille d'environ 25 x 25 cm et est immédiatement traitée pendant la descente. Tous les objets de l'image sont comptés et mesurés et les objets plus grands que 400 µm sont enregistrés sous forme de vignettes. Ces informations, ainsi que la profondeur à laquelle l'image a été prise sont stockées en interne. De plus, l'UVP mesure la profondeur à laquelle il se trouve et dispose d'une horloge intégrée.
Dès que l'UVP est de retour à bord, les vignettes et les données sont transférées sur un ordinateur. Par la suite, nous traitons les images, mesurons les objets imagés et prédisons la catégorie de chaque objet à l'aide d'algorithmes d'apprentissage profond.
Ce pré-tri doit ensuite être vérifié et c'est exactement ce que vous faites dans notre Jeu!
